Maya骨骼教程:下肢骨骼的设定(2)
来源:www.299.com.cn 作者:XiaoYu 发布时间:2010-08-11 15:57:53 网友评论 0 条
2.为关节添加IK手柄
选择Joint1关节,选择主菜单Skeleton > Set Preferred Angle设置关节链的首选角度。
选择IK Handle Tool口,在Current Solver选项窗口中选择ikRPsolver项。
分别在Joint1和Joint3处单击建立IK链。
3.建立极向量约束
选择主菜单Create > Locator建立腿部定位器并将它移动到膝关节的前方。
选中Loctor1定位器,选择Modify > Freeze Transformations冻结变换值后使定位器成为虚拟物体的子物体。
先后选择Locator1(定位器)和ikHandle1(Ik手柄),再选择Constrain > Pole Vector,现在定位器在控制极向量轴。
4.为脚部添加IK手柄
选择IK Handle Tool口,在Current Solver选项窗口中选择ikSCsolver项。
单击Joint3及Joint4建立IK链。
单击Joint4及Joint5建立IK链。
如图: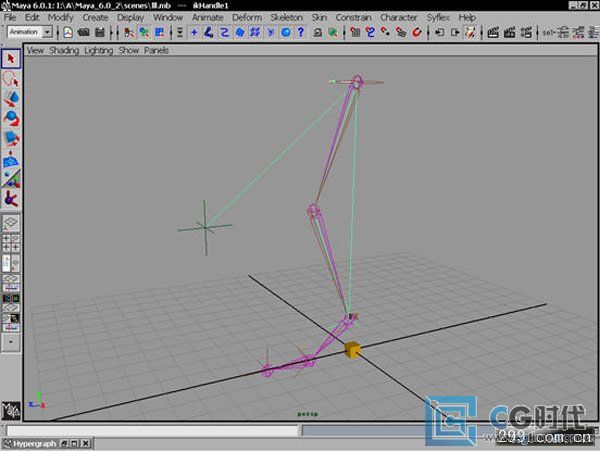
5.创建节点连接关系
打开节点编辑器Hypergraph。
用中键分别将ikHandle1、ikHandle2、ikHandle3节点拖到虚拟物体pCube1节点上,使之成为子物体。择虚拟物体 pCube1,用移动和旋转工具来测定动作效果。
选择ikHandle1和ikHandle2节点后,用Edit > Group命令将它们成组。
选择Group1组节点,用Insert键加V键捕捉将中心点移动到Joint4关节点上来。
再测定动作效果,此时跖骨已能牵连踝关节以上的骨骼运动了,这是预期的结果。
选择ikHandle3与ikHandle2节点,用Edit > Group命令也将它们成组。
选择Group2组节点,用Insert键加V键捕捉将中心点也移动到Joint4关节点上来。
节点连接为图所示: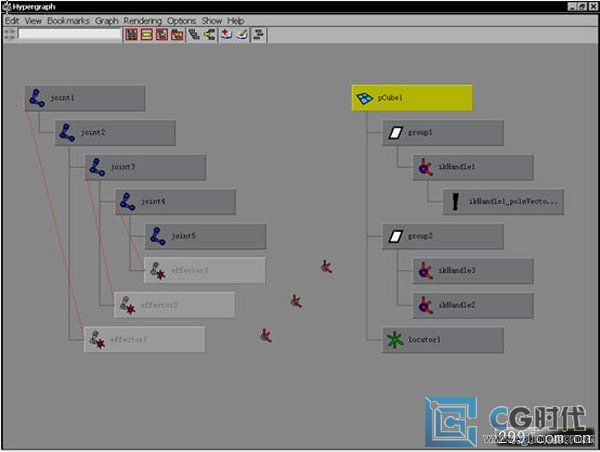
- 2010-08-25
- 2010-08-25
- 2010-08-25
- 2010-05-10
- 2010-08-25
- 2010-08-17
- 2010-05-09
- 2010-05-09
- 2010-08-25
- 2010-08-17
- 2010-08-25
- 2010-05-10
- 2010-08-25
- 2010-08-25
- 2010-08-25
关于我们 | 联系方式 | 广告服务 | 免责条款 | 内容合作 | 图书投稿 | 招聘职位 | About CG Time
Copyright © 2008 CGTime.org Inc. All Rights Reserved. CG时代 版权所有