动画教程:西直门2022特效镜头流程解析(6)
来源:火星时代 作者:FLY 发布时间:2011-03-27 20:39:41 网友评论 0 条
导入素材文件后,在工作区里单击右键,弹出右键菜单,选择New Track。把十字星放到需要跟踪的特征点上按住鼠标左键不放,即会出现放大镜供精确对位。调整好位置之后,按F3 正向跟踪 或是Shift +F3 反向跟踪(或点击工具栏上)即可实现对跟踪点的2D跟踪解算。跟踪后无外乎三种情况,第一种就是没什么问题,跟踪完美。第二种就是某个时间段还不错,但有些地方遇到其他情况如运动模糊之类的跟丢了。这类问题可以通过手动设定Tracker的关键帧来解决。方法很简单,就是用时间导航快捷键组合,键精确调整到跟踪出错的帧数,然后选择需要修改的Tracker重新对位。

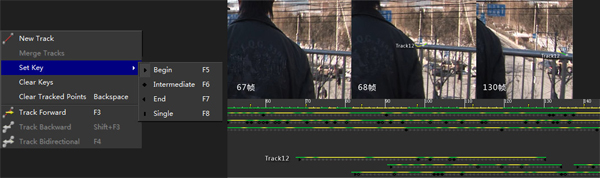
再有一种情况就是,跟踪点被前景物体遮挡或是到了镜头边沿导致跟踪失败。在说明这个问题前我先说明一下 Matchmover的几种关键帧。鼠标右键>Set Key菜单下可以看到四种关键帧,Begin(起始帧)、Intermediate(中间帧)、End(结束帧)、Single(单帧),如下左图所示。Matchmover就是通过关键帧的组合定义来判断什么时候跟踪点起始有效什么结束。在这个镜头中,在前面的67帧中前景人物挡住了Track12,所以Track12的起始帧是在第68帧,130帧后,Track12划出画面,结束帧设为130帧,如下右图所示。如果说镜头运动后Track12对应的跟踪点又出现在画面中,选择跟踪点再次出现的帧,设好跟踪点后把关键帧设成起始帧就可以了。
在说完关键帧后,就不得不提一下双向跟踪(Track Bidirectional)。所谓双向跟踪就是正向反向的两次跟踪然后求两次跟踪轨迹的平均值,这样求出来的轨迹相对单向跟踪更加平滑。双向跟踪在使用上要求正向反向两个方向上都有关键帧供解算跟踪。因为双向跟踪使用的是两次跟踪,所以相对而言解算时间要长一些,尽管如此,双向跟踪的作用还是非常明显的。在实际的拍摄过程中经常会因为运动模糊致使跟踪点形状模糊,进而导致跟踪轨迹存在小幅的噪波,而双向跟踪对类似这样噪波修复是非常有帮助的。
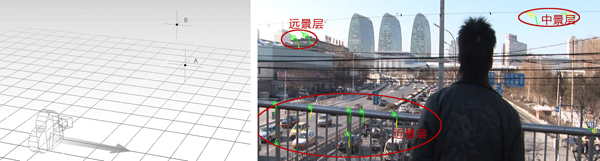
剩下的就是需要一个个跟踪点手动去跟了,基本是体力活,没啥好讲的。需要补充说明的是关于手动跟踪点选择应该注意的一些问题。我们在布置跟踪点的时候一共设了14个跟踪点,在实际镜头中可用的有11个点。需要注意的是这个11个点都在栏杆上,假定以镜头纵深方向为z轴的话,那么这些点在z轴向上的数值都是一样的。这是非常不可取的。如下图所示,摄影机向右运动,前景点A跟后景点B势必产生位移,但因为前景点A跟后景点B处于不同的纵深,所以两个点在拍摄画面中的位移也是不太一样的。摄影机运动轨迹解算正是通过前景点A跟后景点B的相对位移反向计算生成的。正因为如此,单有A区域的跟踪点或是单有B区域的跟踪点很难形成跟踪软件解算所需要的“视差(透视变化)”,这很容易造成镜头解算的错误或是弱解情况的产生。所以,在手动选择跟踪点的时候一定确保跟踪点在纵深方向上的多层次,如下图右图所示。
- 2009-11-07
- 2009-11-04
- 2009-10-10
- 2009-11-04
- 2009-12-22
- 2010-01-04
- 2009-11-09
- 2009-11-06
- 2009-11-06
- 2009-11-24
- 2009-11-30
- 2009-11-15
- 2009-11-05
- 2010-01-04
- 2009-11-04
关于我们 | 联系方式 | 广告服务 | 免责条款 | 内容合作 | 图书投稿 | 招聘职位 | About CG Time
Copyright © 2008 CGTime.org Inc. All Rights Reserved. CG时代 版权所有