动画教程:西直门2022特效镜头流程解析(7)
来源:火星时代 作者:FLY 发布时间:2011-03-27 20:39:41 网友评论 0 条
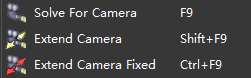
手动跟踪好合适的跟踪点后,下一步就是镜头解算工作了。如下图所示,Matchmover提供了三种解算方式。Solve For Camera 解算摄影机,指的是不管在什么情况下都重新解算摄影机。Extend Camera 扩展解算摄影机,指的是基于此前已经解算的方案上重新解算任何新的Track动作。Extend Camera Fixed 固定拓展解算摄影机,指的是现有解决方案不变,只解算新的Track动作。
解算后的问题很自然的就是判断跟踪的准确性。判断一个镜头是否跟踪准确可以通过三个步骤逐步检测。第一步,检查Track是否对应相应的跟踪点,在解算完成之后,单击视图左上角的切换摄影机3D视图。C键是锁定摄影机视图,Ctrl+Alt+LMB推拉视图,Alt+LMB移动视图,Alt+RMB旋转视图。如下图左图所示,解算出来3D Track会以蓝色的倒三角显示,在这一环节中,主要判断跟踪出来的3D Track在视频播放过程中是否准确对位相应的跟踪点,3D Track的相对位置是否跟实际的空间相对位置一致。
第二步,创建简单的BOX或是导入其他什么三维模型来实际测试。注意,有时候出现不匹配的情况很有可能是模型物体没有放置在正确的地方。

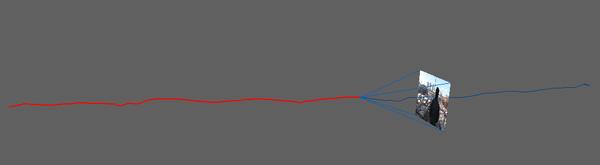
最后一步,也是最容易忽略的,便是在3D视图下检查摄影机轨迹是否存在噪点(晃动),理想的摄影机运动路径应该是一条平滑的曲线。
不管在哪款跟踪软件里,坐标系统的设置都不是必须的,但是一个好的坐标系统能让你之后的工作效率加倍。Matchmover采用的是两轴定位方法,即定义出两个轴向后软件自动求出第三个轴向。而定义单个轴向的方法有两种,一种是点对点,另外一种是三点成面形成的法线方向。

Matchmover的坐标设定非常直观, xyz三个轴线另带了一个距离设定控制器。坐标设置可以根据需要在视图中直接调整,也可以通过右侧的属性面板精确设置。距离点设定对于后期场景的比例把握非常重要,所以前期拍摄的时候一定做好相关的记录工作,距离设置默认从原点开始。
- 2009-11-07
- 2009-11-04
- 2009-10-10
- 2009-11-04
- 2009-12-22
- 2010-01-04
- 2009-11-09
- 2009-11-06
- 2009-11-06
- 2009-11-24
- 2009-11-30
- 2009-11-15
- 2009-11-05
- 2010-01-04
- 2009-11-04
关于我们 | 联系方式 | 广告服务 | 免责条款 | 内容合作 | 图书投稿 | 招聘职位 | About CG Time
Copyright © 2008 CGTime.org Inc. All Rights Reserved. CG时代 版权所有